最終更新日 2015年01月30日
カーネルによるノンパラメトリック事後分布推定
|
観測が y の場合、その原因となる x が知りたい事が多い この場合一般に事後分布 p(x/y) を求めるが、事前分布や共役事前分布を仮定する場合が多い カーネルを使うと分布を前提とぜず事実である観測値 y だけで事後分布を推定できる |
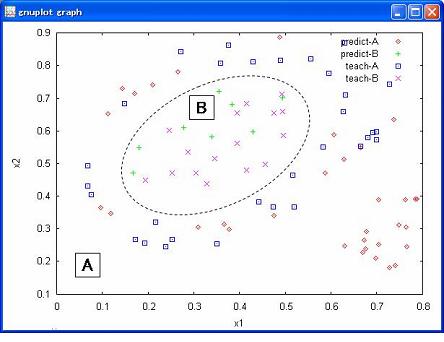
図1ではAとBの領域を区分したい場合、単純な線では区分できない。
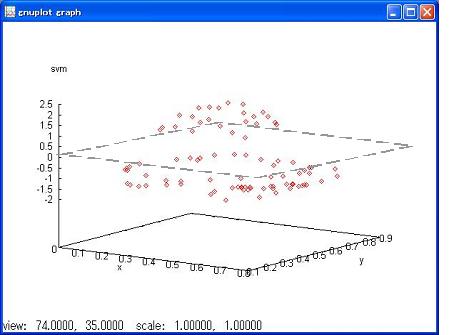
例えば図2の様に点を高次元の空間に写像して操作してやると平面で区分できそうである。
|
高次元での操作はかなり複雑になるので、 一般に高次元に写像された2点の内積が簡単になる写像を選ぶ この写像をカーネルという。 この様にカーネルを用いればモデルを仮定せず高次元上の操作だけで解く事ができる。 |
先行事例と同じ問題を解く Kernel Bayesian Computation の R による実装例
|
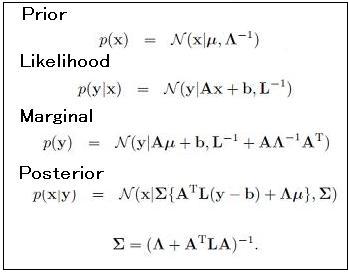
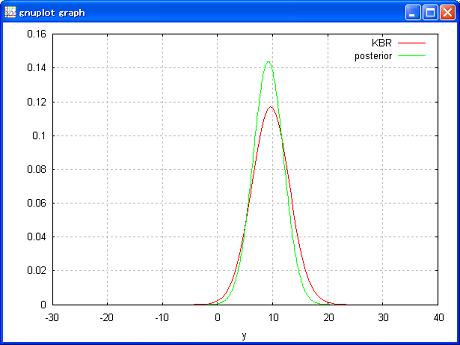
μ ~ p(x) = N(x|0,100) p(y) = N(y|μ,3/25) p(x / y=10)の事後分布を解く この事後分布(Posterior)は次のガウス分布の公式で解析的に解ける N(x|120/13,100/13) |
|
<計算条件①> 真の事前分布は判明しているとする:N(x|0,100) 入力データ:p(x,y)で生成した100件のデータ カーネルはガウスカーネルを使用 σ=0.3 |
|
KBR:カーネルによる事後分布 Posterior:解析解の分布 大体一致している |
|
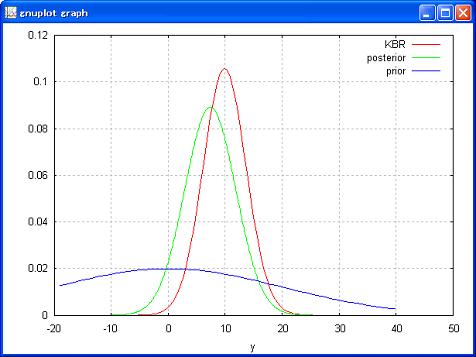
μ ~ p(x) = N(x|5,100) p(y) = N(y|μ,25) p(x / y=8)の事後分布を解く この事後分布(Posterior)はの解析的は以下となる N(x|37/5,20) |
|
<計算条件> 不明なので平らな事前分布を設定する:N(x|0,400) 入力データ:p(x,y)で生成した100件のデータ カーネルはガウスカーネルを使用 σ=0.3 |
|
KBR:カーネルによる事後分布 Posterior:解析解の分布 Prior:平坦な事前分布 アバウトな事前分布でも推定できている |